
Макет сомплекса сбора и трансляции разнородной информации
Разработана концепция создания Макета по следующей схеме:

Отработка алгоритмов ведется на базе комплекса наземных и воздушных РТС и их виртуальных моделей. В лаборатории сейчас используется 3 мультикоптера и 12 наземных платформ. Планируется закупка аппаратов самолетного типа.
Наземный РТК
На текущий момент:
Спроектированы несущие платформы для оборудования и электроники, устанавливаемые на шасси. Собрана и протестирована электроника для реализации роботов по исходным проектам (н-р, Ardurover). Проведена сборка робототехнических платформ.
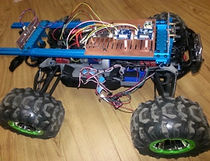
Транспорт (Ardurover)
Макет:

Проект:


Основное назначение:
-
транспортировка и взлет/посадка БПЛА мультироторного типа;
-
транспортировка и погрузка/разгрузка измерительного оборудования и РТС «Разведчик»;
-
манипулирование окружающими предметами с целью расчистки дороги;
-
создание и редактирование 3D-карты местности;
-
проведение обследования на местности и в помещениях и создание 3D-карты.
Сделано:
Собрана робототехническая платформа, способная как двигаться автономном режиме по маршруту по координатам GPS, так и в ручном режиме, под управлением с пульта.
Разведчик (Ровер, контроллер sbRio, гусеничный)


Разведчик (Ровер, контроллер Arduino, гусеничный)


Основное назначение:
-
манипулирование окружающими предметами с целью расчистки дороги;
-
создание и редактирование 3D-карты местности;
-
проведение обследования на местности и в помещениях и создание 3D-карты.
Сделано:
Собраны 11 робототехнических платформ, способных двигаться как в автономном режиме по программе, так и в ручном режиме, под управлением с пульта.
На собранных платформах предполагается тестировать разрабатываемые алгоритмы и установить дополнительное оборудование: видеооборудование, оборудование для 3D-сканирования, ИК- и ультрозвуковые дальномеры, датчики газа, датчики давления, температуры, влажности. Предполагается так же отработать организацию сетевого взаимодействия на базе модулей для телеметрии XBee.
Воздушный РТК
Разрабатываются беспилотные платформы:
Ардукоптер

Назначение: отработка алгоритмов и доп. оборудования, полеты в помещениях.
DJI Phantom 2 Vision

Назначение: отработка технологии фото- и видеосъемки, обучение пилотов.
DJI S1000

Назначение: отработка алгоритмов и доп. оборудования, полеты на открытой местности.
На текущий момент:
-
Собран ДПЛА по проекту Arducopter (полет по gps-точкам и под ручным управлением). Проводятся тестовые полеты, отлаживается система управления. Планируемый срок окончания тестирования – апрель.
-
Ведется доработка платформы DJI Phantom 2 Vision для осуществления автономного полета по GPS. С использованием платформы ведется обучение пилотов и тестирование механизмов фото- и видеосъемки. Планируемый срок доработки и окончания тестирования – май.
-
В виртуальной среде разработана программа автопилота для ориентирования в пространстве с использованием 3D ик-камеры. Планируется установка системы и камеры на Arducopter.